伺服电机
更新: 6/29/2026 字数: 0 字 时长: 0 分钟
准备
硬件
| 硬件 | 说明 | 图片 |
|---|---|---|
| 创意盒平台 |  | |
| 电源信号模块 | 购买创意盒附送,伺服电机的控制信号为5V,需要用该模块将平台3.3V信号升压至5V。 |  |
| 伺服电机 | 淘宝购买链接,平台支持页面罗列出的电机,请根据需求任选。 |
软件
| 软件 | 链接 | 说明 |
|---|---|---|
| 测试应用 | 链接 | 官方前端应用,可直接通过控制台加载和使用。 |
连接
| 连接 |
|---|
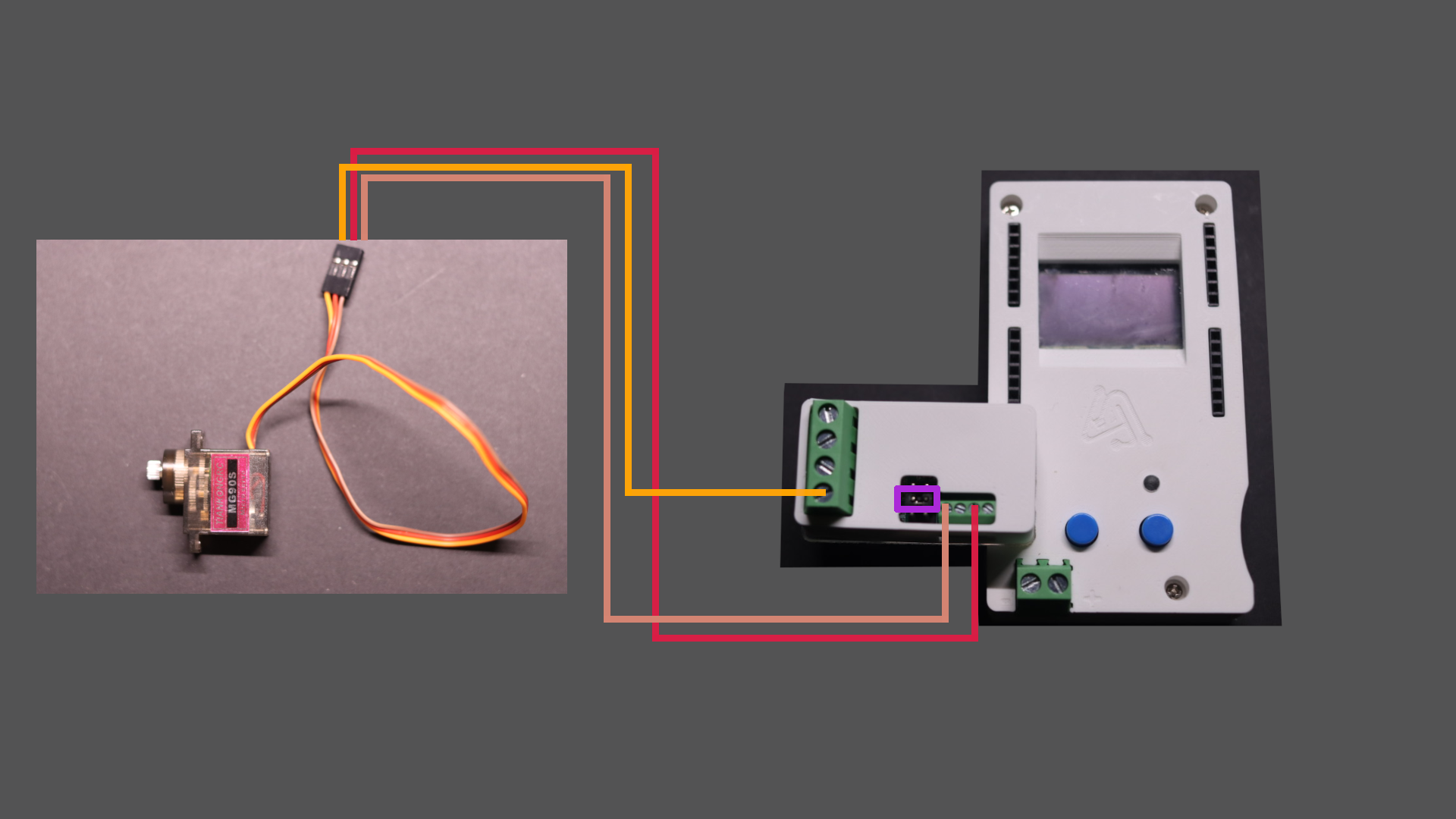
| 将电源信号模块插到平台任意一组排针。 |
| ▀ 伺服电机的红色电源线和电源信号模块的5V输出连接。 |
| ▀ 伺服电机的地线和电源信号模块的地连接。 |
| ▀ 伺服电机的控制信号线和电源信号模块的信号输出口连接,这里对应平台引脚8。 |
| ▀ 将跳线帽调至5V位置。 |
使用
打开创意盒控制台,选择测试应用类,并加载用户测试应用。输入下面的命令,您可以转动-90度,0度,90度。
根据参考命令,您可以二次开发伺服电机应用。

输入指令转动-90度:
下面命令中的50代表50HZ,3.0代表PWM输出3秒,"sync"代表同步输出模式,8代表平台引脚8,25代表占空比。 请查阅文档,API接口章节获得PWM接口的详细信息。
{
"event":"now",
"actions": [["pwm", 0, 50, 3.0, "sync", 8, 25]]
}输入指令转动0度:
{
"event":"now",
"actions": [["pwm", 0, 50, 3.0, "sync", 8, 76]]
}输入指令转动90度:
{
"event":"now",
"actions": [["pwm", 0, 50, 3.0, "sync", 8, 128]]
}原理
伺服电机(Servo Motor)是一种能够精确控制位置、速度和加速度的电机。它们内部有反馈系统,以实现高度精密的运动控制。

伺服的含义
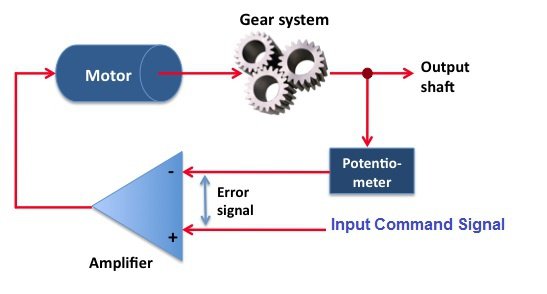
伺服机构(Servomechanism),通常简称为伺服(Servo),是一种专业的自动控制系统,旨在控制对象的位置或运动。它由四个主要组成部分组成:
- 输入指令:系统需要实现的期望位置或运动。
- 反馈:系统持续接收有关被控制对象实际位置或运动的反馈。这个反馈用于与输入指令进行比较并进行必要的调整。
- 功率放大:系统包括一个功率放大机制,可以增加施加在对象上的功率或力,确保其能够实现期望的位置或运动。
- 输出:输出是系统控制的结果,通常是对象的运动或定位。
伺服机构广泛应用于需要精确控制位置或运动的各种应用中。它们通常出现在机器人技术、航空航天系统、工业自动化、汽车系统等领域,其中精度和响应性至关重要。伺服机构中的反馈回路允许其持续调整和纠正与期望位置的偏差,确保准确稳定的控制。
内部结构
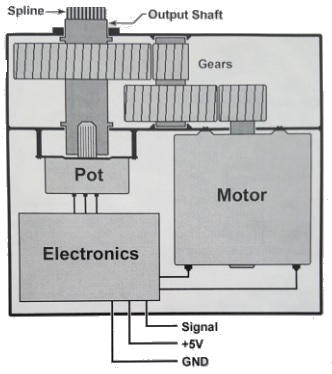
伺服电机有三根引线。一根用于电源,另一根用于地线,第三根是控制引线。由于伺服是一个闭环反馈系统,需要控制引线来感知伺服轴的位置并在必要时进行调整。
伺服电机至少包含以下三个主要部分:直流电机、减速齿轮和控制电路。
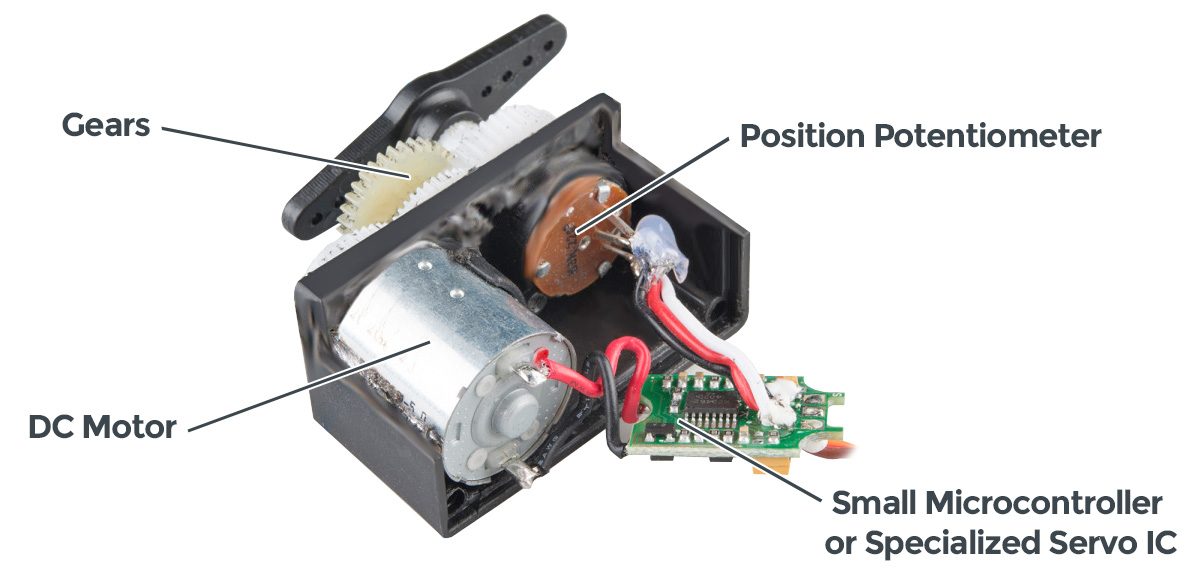
- 直流电机:负责改变方向。在上图中是银色的部分。
- 减速齿轮:这些齿轮将直流电机的速度减少到适合进行精细控制的速度。由于有了这些齿轮,电机的多次旋转等于伺服轴的一次旋转。外壳上带有孔的黑色部分是伺服的角。角用于将杆和其他物品连接到伺服电机。它们有各种不同的形状和大小。
- 控制电路:伺服的输出齿轮连接到一个电位计(上图中的棕色物体),它是一个可变电阻。电位计的位置指示了伺服电机轴的位置。还有一个带有一些电路的小板,它读取电位计并控制伺服。
下图是一个典型的伺服电机的内部示意图:
控制信号
提示
以下信息适用于0-180度控制角度的伺服电机,其他类型的伺服电机原理相似。
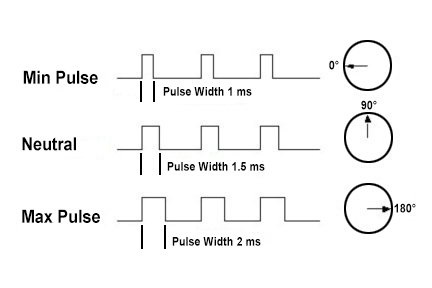
伺服电机由4.8V到6V的电源供电,除此以外,它还需要特殊的控制信号。控制伺服电机运作的信号是一系列电脉冲。决定伺服位置的是脉冲的确切长度或持续时间。控制伺服的不是每秒脉冲的次数,而是控制它的脉冲的持续时间。
脉宽调制依赖于数字脉冲的占空比(开时间与关时间)。然而,伺服不关心占空比;它们关心的是脉冲的持续时间。这就是使伺服控制略有不同于PWM的原因。因此,更准确地说,可以将伺服控制称为脉冲持续时间调制。
脉冲的持续时间通常为0.5 - 2.5毫秒。0.5毫秒的脉冲将使其向一个方向旋转,1.5毫秒的脉冲将使伺服返回到中点,而2.5毫秒的脉冲将使其向另一个方向旋转。典型伺服的运动范围为0到180度,或接近这个范围。
通常,伺服电机每秒需要大约50个这样的脉冲,这个被称为伺服的刷新率或帧率。如果这个速率太低,准确性和保持力矩会降低。如果太高,伺服可能会抖动或无法正常工作。