步进电机
更新: 6/29/2026 字数: 0 字 时长: 0 分钟
步进电机是直流电机的一种。它的特点是,中心轴每一步都旋转特定的角度。
步进电机适用于需要低速和高精度位置控制的应用。例如,它们可以控制打印机进纸,或者调整望远镜角度跟踪星星。步进电机还用于绘图仪和传感器定位等其他领域。
准备
硬件
| 硬件 | 说明 | 图片 |
|---|---|---|
| 创意盒平台 |  | |
| ULN2003单极电机驱动 | 淘宝购买链接,有12V或5V两个选择,平台两个电压输出都支持,12V步进电机提供更大的扭矩。 | |
| 28BYJ-48单极步进电机 | 淘宝购买链接,一般ULN2003驱动芯片是和28BYJ-48电机绑定销售的。 |
软件
| 软件 | 链接 | 说明 |
|---|---|---|
| 步进电机应用 | 链接 | 官方前端应用,可直接通过控制台加载和使用。 |
连接
TIP
平台支持5V或12V版本的步进电机,请在平台配置页面将输出电压对应值(5V或12V),然后使用支持TypeC PD的电源供电并确保屏幕上显示对应的电压值。
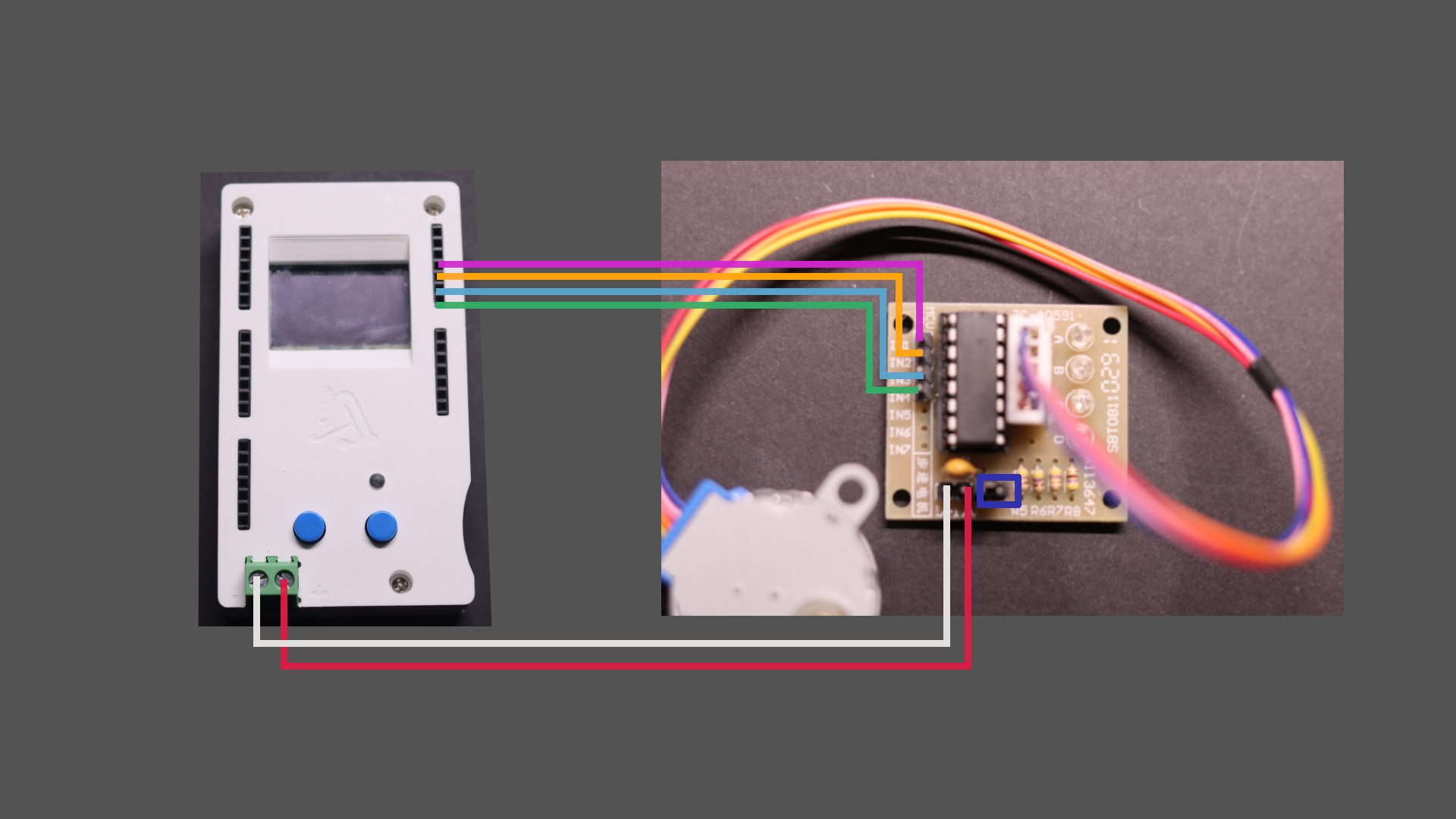
| 连接 |
|---|
| ▀ 在平台配置页面设置电机对应的输出电压,将端子的正极连接驱动模块的电源输入端。 |
| ▀ 将端子的负极连接驱动模块的地。 |
| ▀ 确保跳线帽连接驱动模块的使能引脚 |
| ▀ 驱动模块的IN1信号和平台引脚0连接 |
| ▀ 驱动模块的IN2信号和平台引脚1连接 |
| ▀ 驱动模块的IN3信号和平台引脚2连接 |
| ▀ 驱动模块的IN4信号和平台引脚3连接 |
使用
打开创意盒控制台,选择电机类,并加载步进电机应用。进入该应用,选择相位信号(IN1)与平台连接的引脚编号,选择转动方向,驱动模式,速度等参数。然后点击开始,电机会开始转动。
| 创意盒控制台 | 加载应用 | 选择参数 | 开始 |
|---|---|---|---|
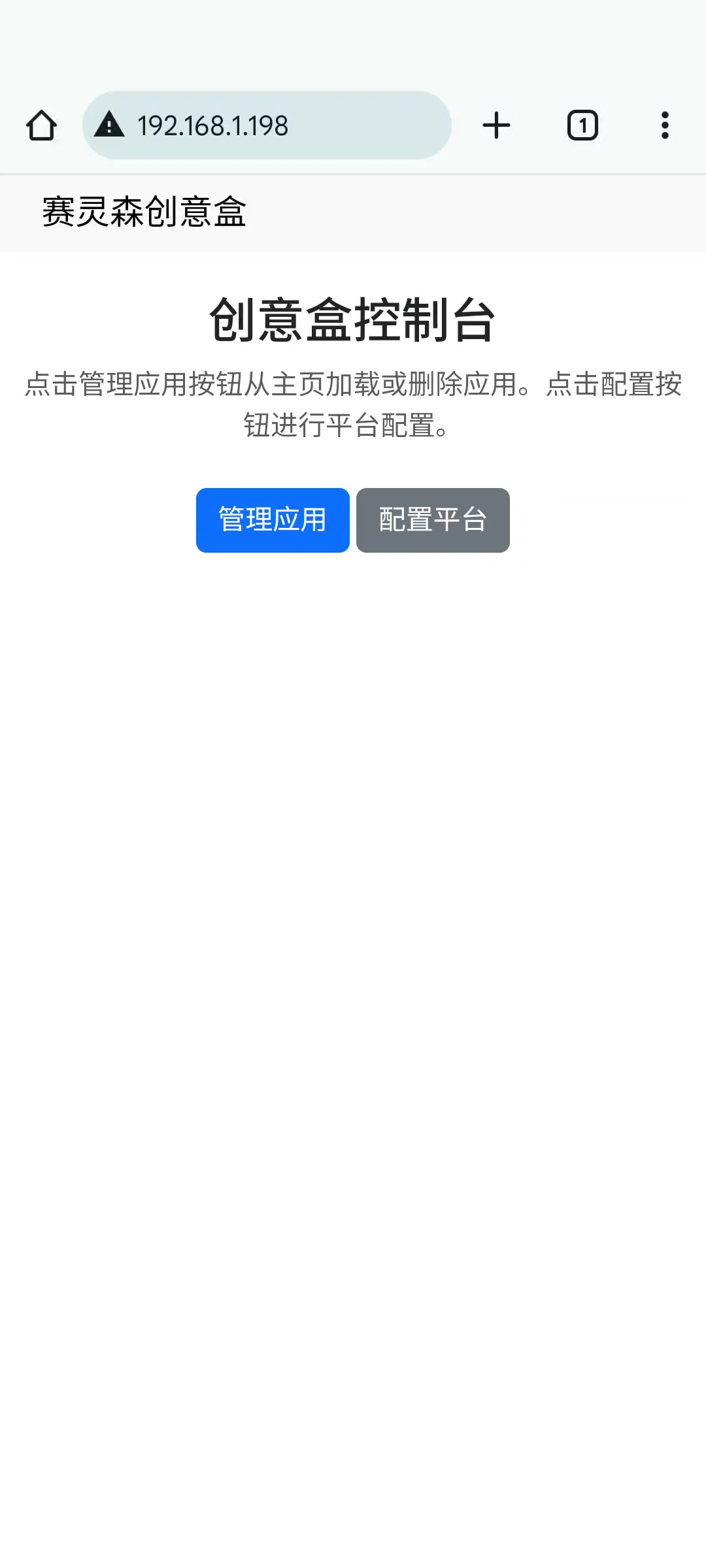 |  | 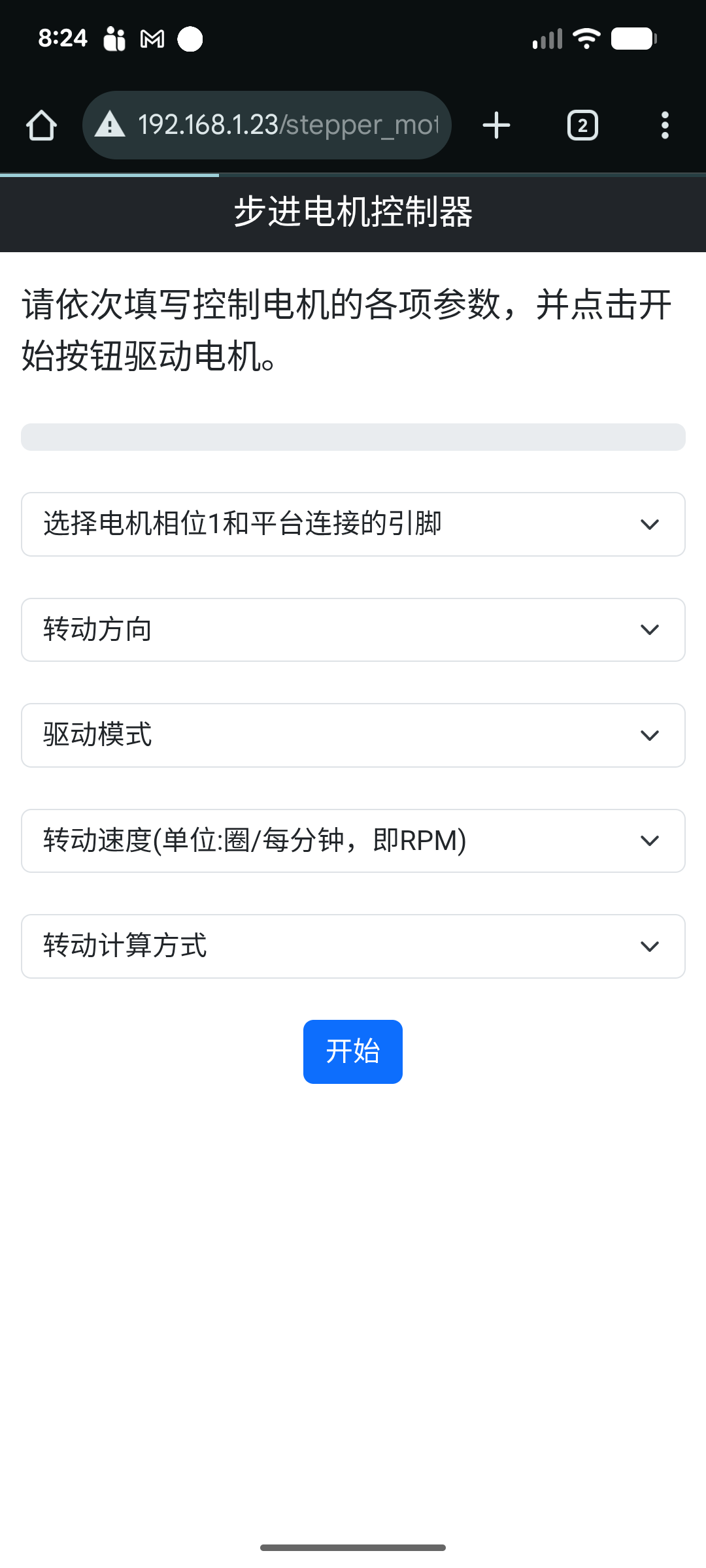 | 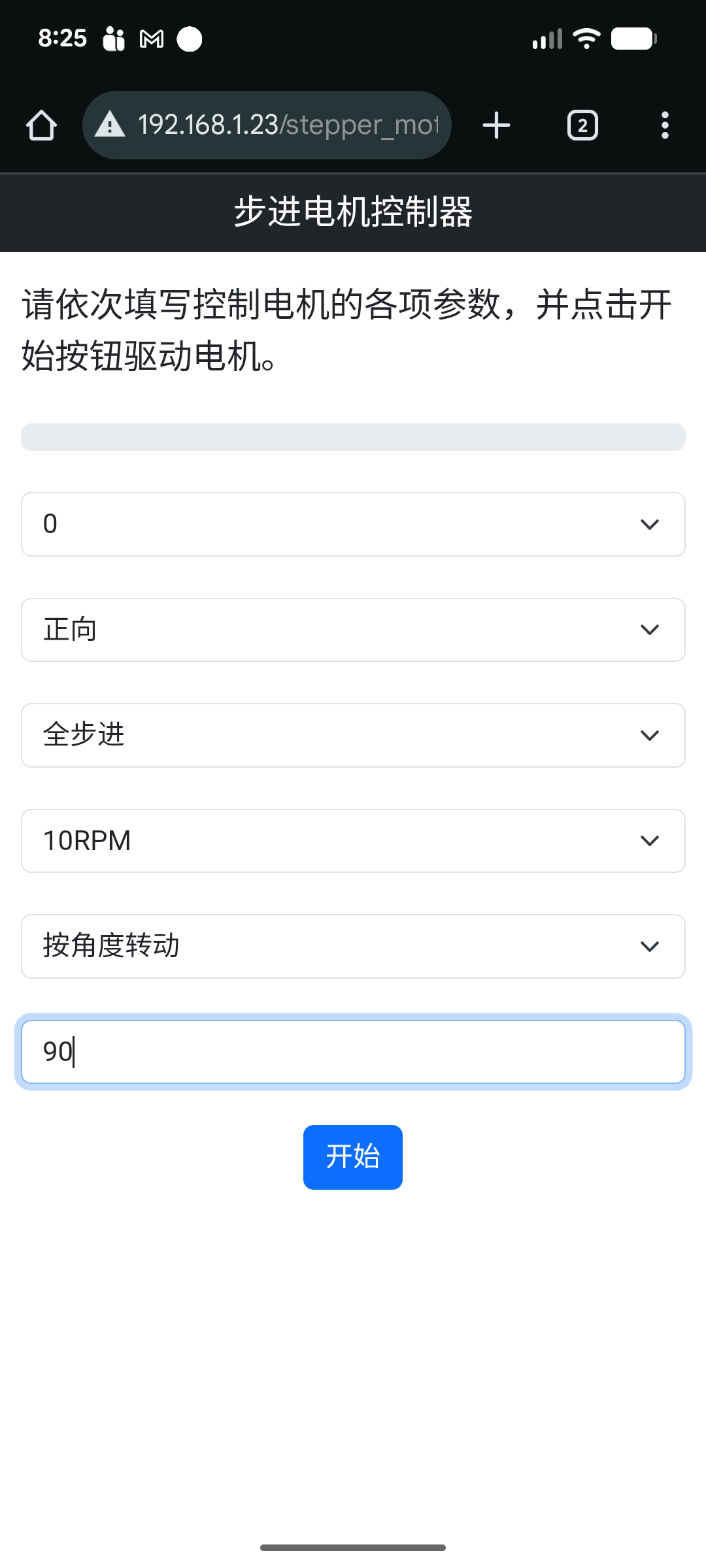 |
原理

步数
当电路上施加时钟脉冲时,步进电机会旋转特定的角度,也称为一步。每转的步数决定了步进电机的分辨率。步数的范围从4到400,常见的有12、24和48。
分辨率通常以 360°/步数 表示。200步/每转的电机,分辨率是 360°/200 = 1.8°。
对于给定的步进电机,每步的度数(分辨率)可以小至0.72°,也可以大至90°。常见的通用步进电机分辨率为每步15°和30°。高分辨率的代价是速度和扭矩。在相同尺寸下,分辨率越高,每转所需的步数越多,最高转速越低,扭矩也越低。
工作原理
步进电机有一个静止的部分(定子)和一个移动的部分(转子)。在定子上缠绕着线圈,而转子则是永磁体或可变磁阻铁芯。下图显示了一个电机的截面,其中转子是一个可变磁阻铁芯。
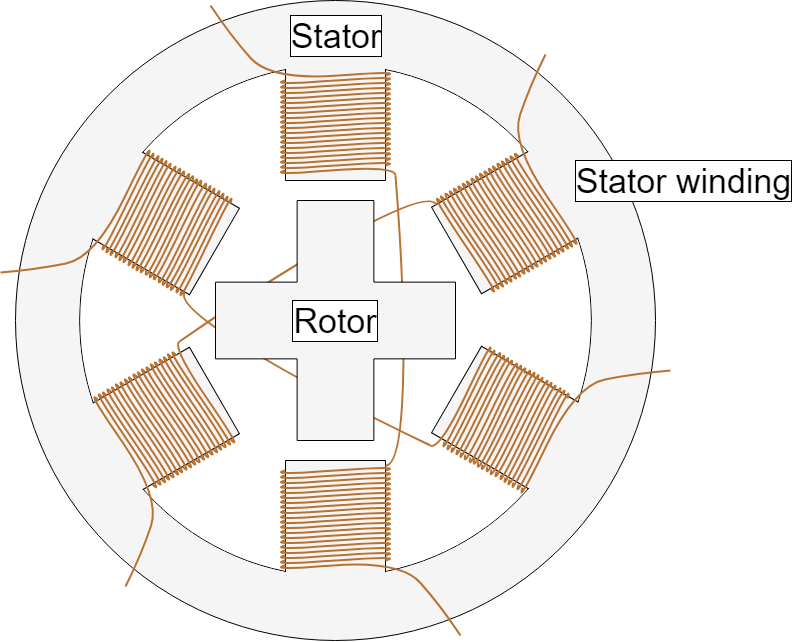
当给一个或多个定子相通电时,线圈中的电流会产生磁场,转子会与该磁场对齐。按顺序给不同的定子相位通电,就可以使转子旋转特定角度以达到所需的最终位置。
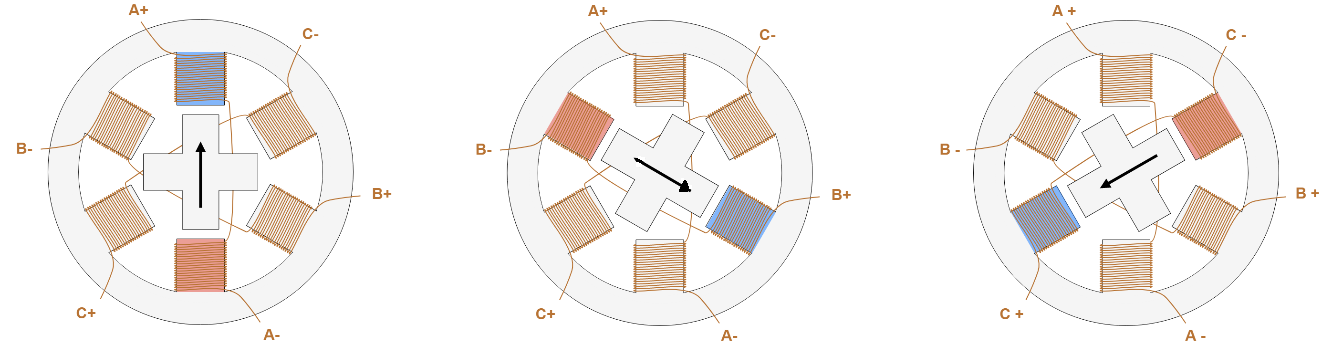
下图显示了步进电机的工作原理。在开始时,通电定子A,转子与其产生的磁场对齐。当通电定子B时,转子顺时针旋转60°以与新的磁场对齐。当通电定子C时,转子再次顺时针旋转60°。
扭矩
扭矩就是使物体发生转动的力量。一个简单的比喻:拧螺丝,当您用扳手拧螺丝时:您的手施加在扳手上的力,就是力。
扳手的长度,就是力臂。扭矩 = 力 × 力臂。如果您想更轻松地拧紧螺丝,您会怎么做?用更大的力气去推扳手(增大“力”)。换一个更长的扳手(增大“力臂”)。
扭矩的物理定义为:力(牛顿)和力臂(米)的向量积。一牛顿大小约为一个中等苹果的重量。
下面的图表展示了28BYJ-48步进电机,12V版本和5V版本的扭矩数据。可以看到12V版本提供更高的扭矩。当然对于步进电机而言,速度和驱动方式也会影响扭矩。
分类
对于步进电机,基本上有三种类型的转子:永磁体转子(磁铁)、可变磁阻转子(铁芯)和混合转子。混合转子具有特定的构造,是永磁体和可变磁阻版本之间的混合体。
而定子的主要特征包括其相数和极对数。相数是独立线圈的数量,而极对数表示每个相占据了多少对齿。两相步进电机是最常用的,而三相和五相电机较少见。
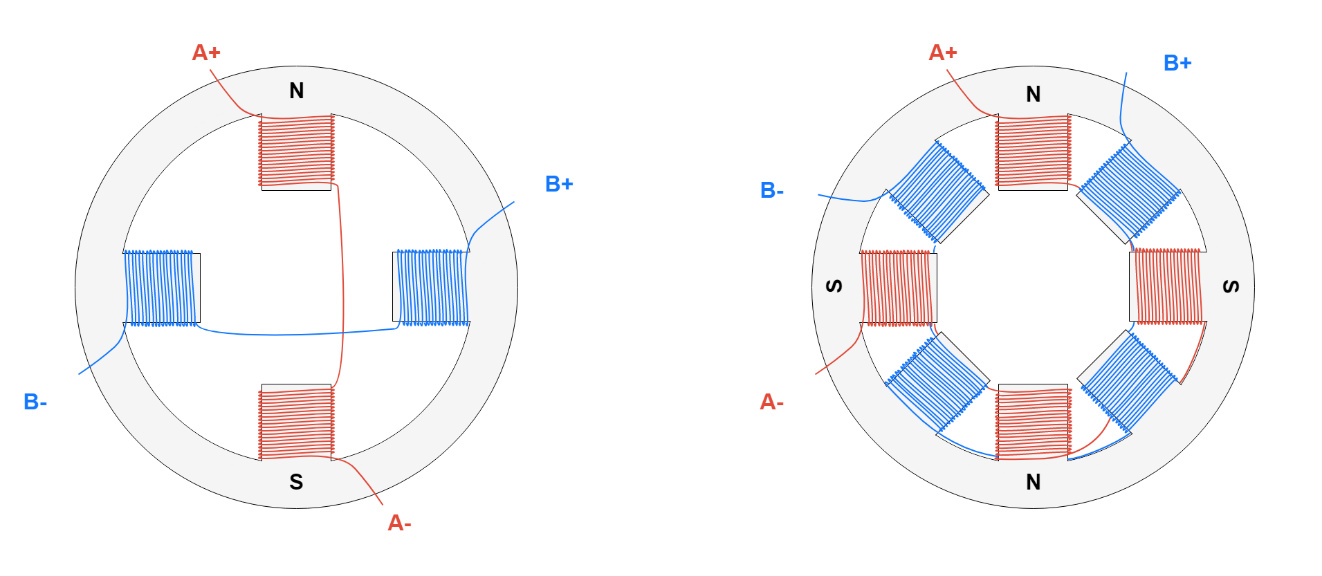
下图显示的是两相定子绕组(左),三相定子绕组(右)。
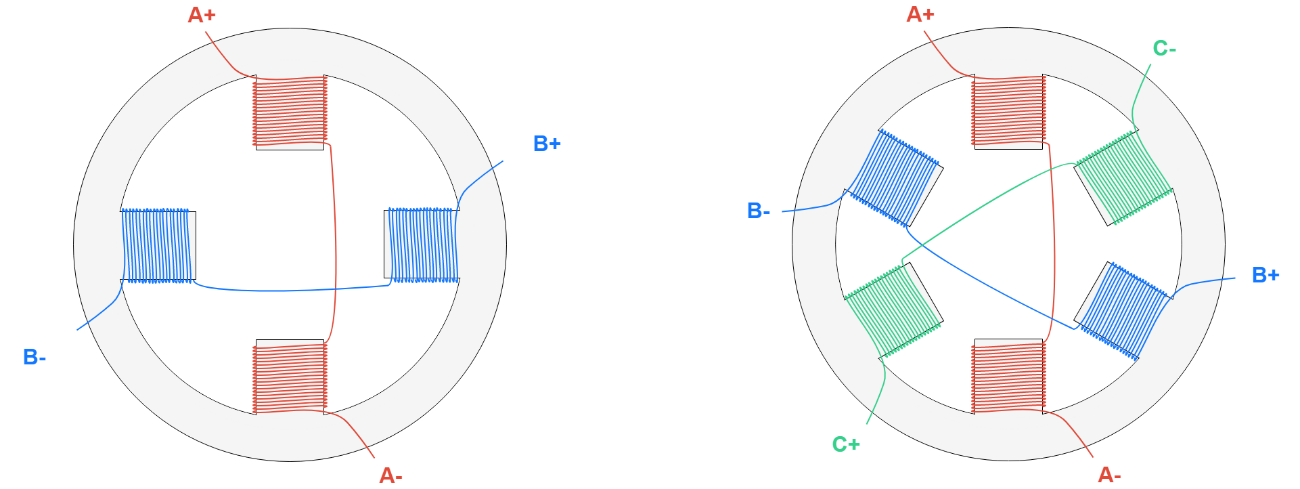
而下图是两相,单极对定子(左)和两相,双极对定子(右)的比较。字母表示当在A+和A-之间施加正电压时产生的磁场。
驱动
当电机电机转动时,需要的电流很大,绝大多数的微控制器是无法提供电机转动所需要的电流的。所以需要额外的一个步进控制器,它负责接收微控制器发送过来的相位信号,然后驱动步进电机。
单极驱 动器
单极驱动器有一个公共引线,将始终为负或接地,另外有多条相位引线,当相位引线为正时,对应的定子产生磁场,进而使电机转动。可以使用简单的晶体管电路实现单极驱动器。缺点是可用扭矩较小,因为一次只能激活一半的线圈。
最简单的驱动器可以由几个晶体管组成。按顺序开关这些晶体管,就可以激活各相,从而使步进电机转动。单极驱动器相对廉价,但只能用于单极电机。接下来的实验部分使用的即为单极电机和单极驱动器。
双极驱动器
双极驱动器使用H桥电路来反转通过各个相的电流流向。使用双极驱动器,所有的线圈都可以用于驱动电机,因此可用的扭矩更大。 驱动双极电机需要2个完整的H桥,以便可以反转各相之间的电流。市面上有许多经济实惠的双H桥芯片,L293D就是其中之一。
| 单极驱动芯片 ULN2003 | 双极驱动芯片 L293D |
|---|---|
 |  |
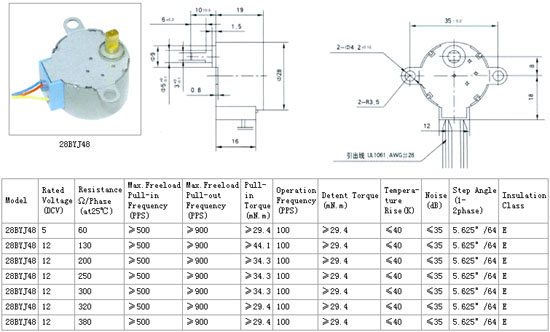
28BYJ-48 单极步进电机
之前我们介绍了步进电机的基础知识,现在来深入了解下这次实验会用到的步进电机28BYJ-48步进电机。
该电机是一款单极步进电机,电机的内部主要分为两层,上面一层是个1:64的齿轮组合,目的是提供角度更小的控制。下面一层是转子和定子。
| 电机拆开后,上层的图片 |
|---|
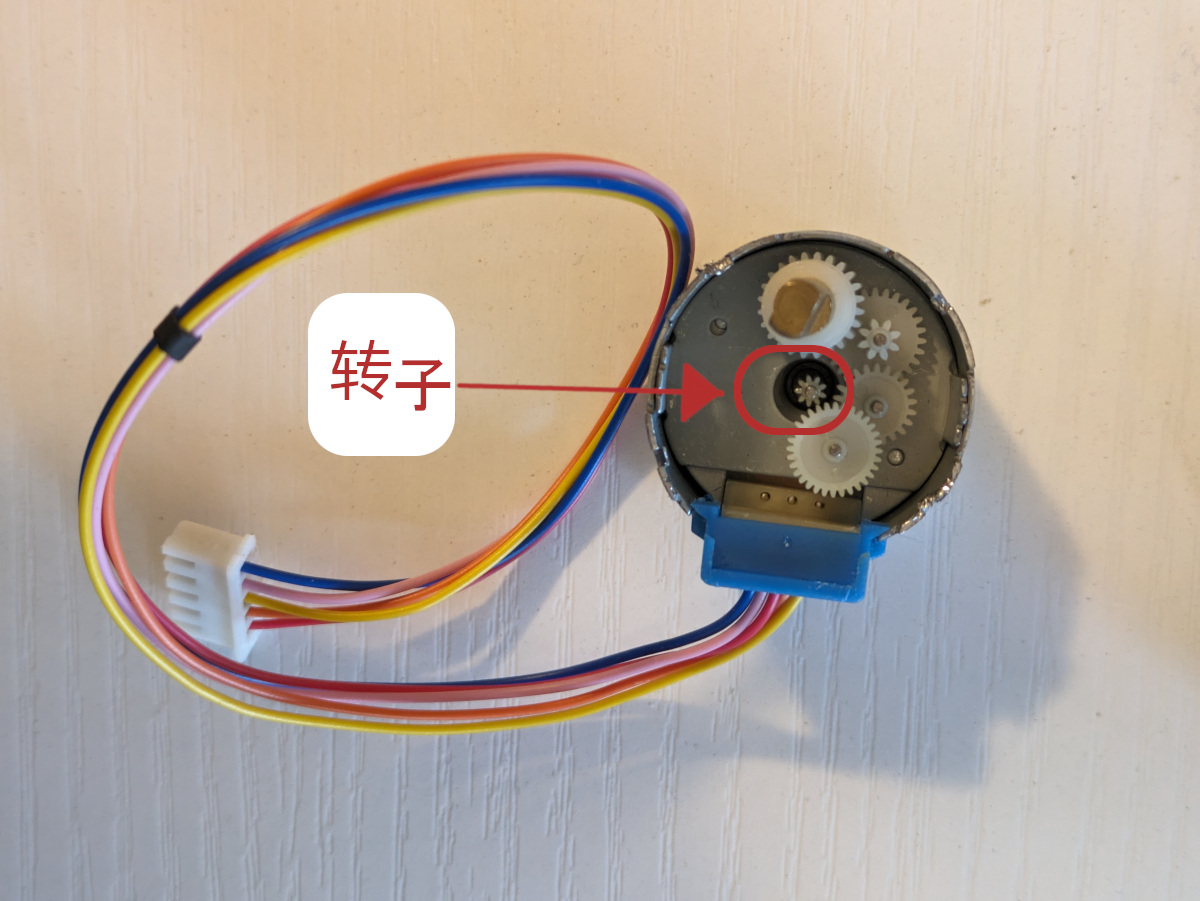 |
| 将上层拿掉后,电机下层的图片。转子 | 定子 |
|---|---|
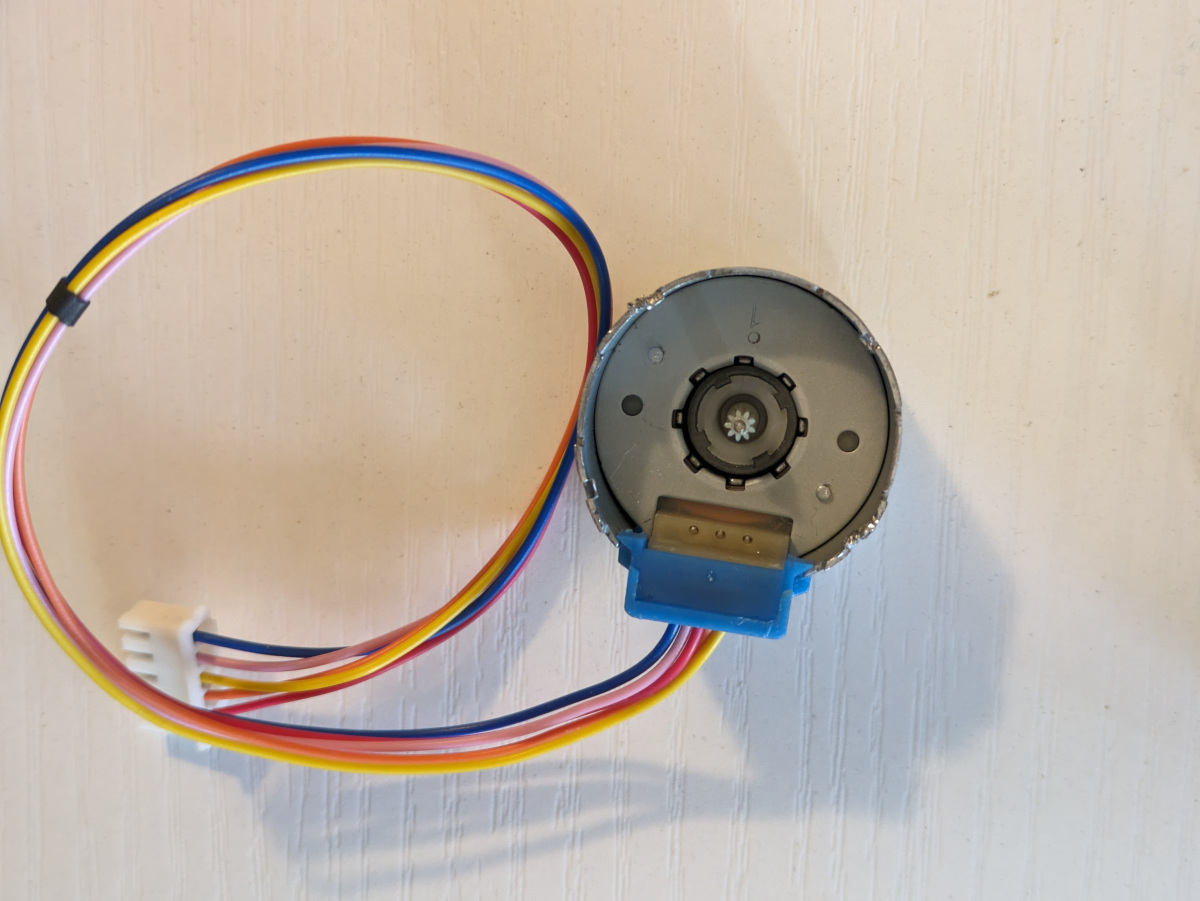 | 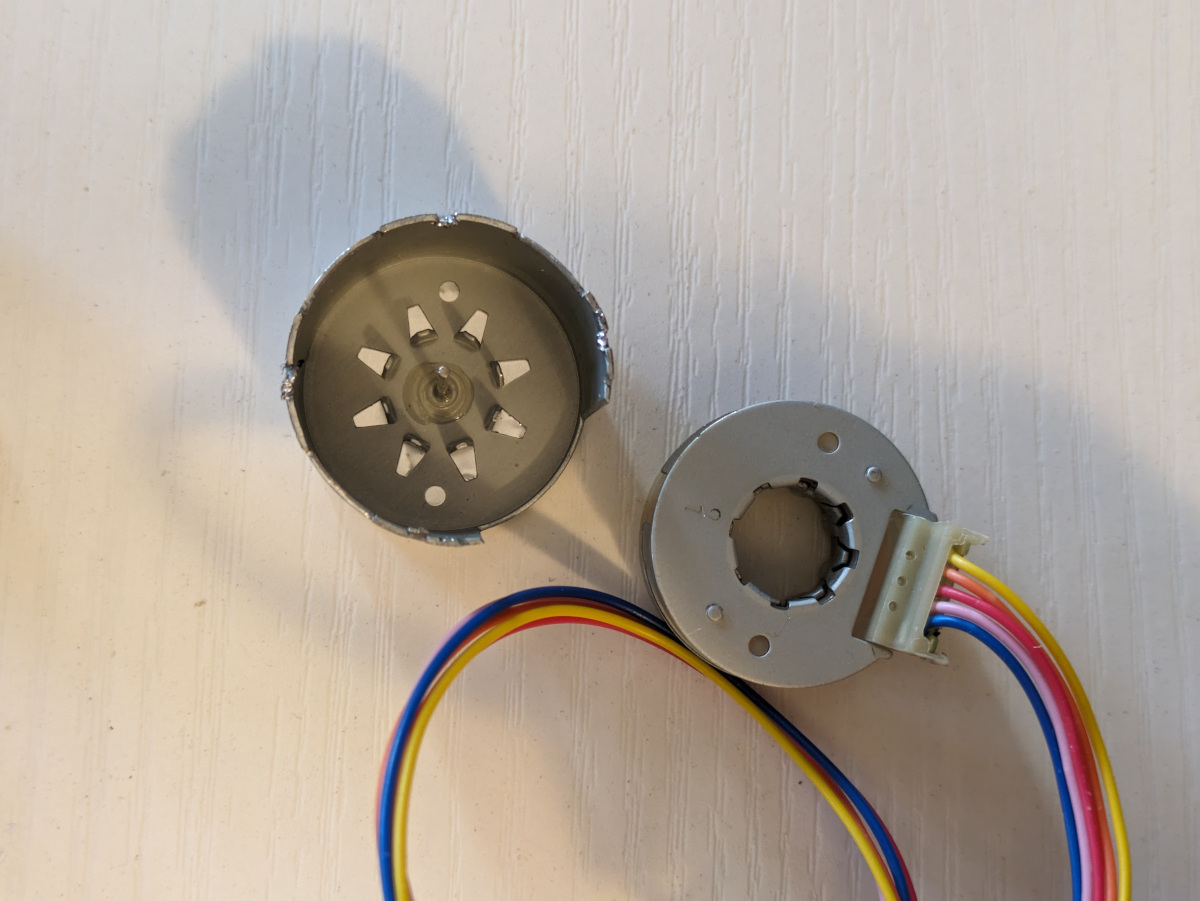 |
| 定子的细节照片 |
|---|
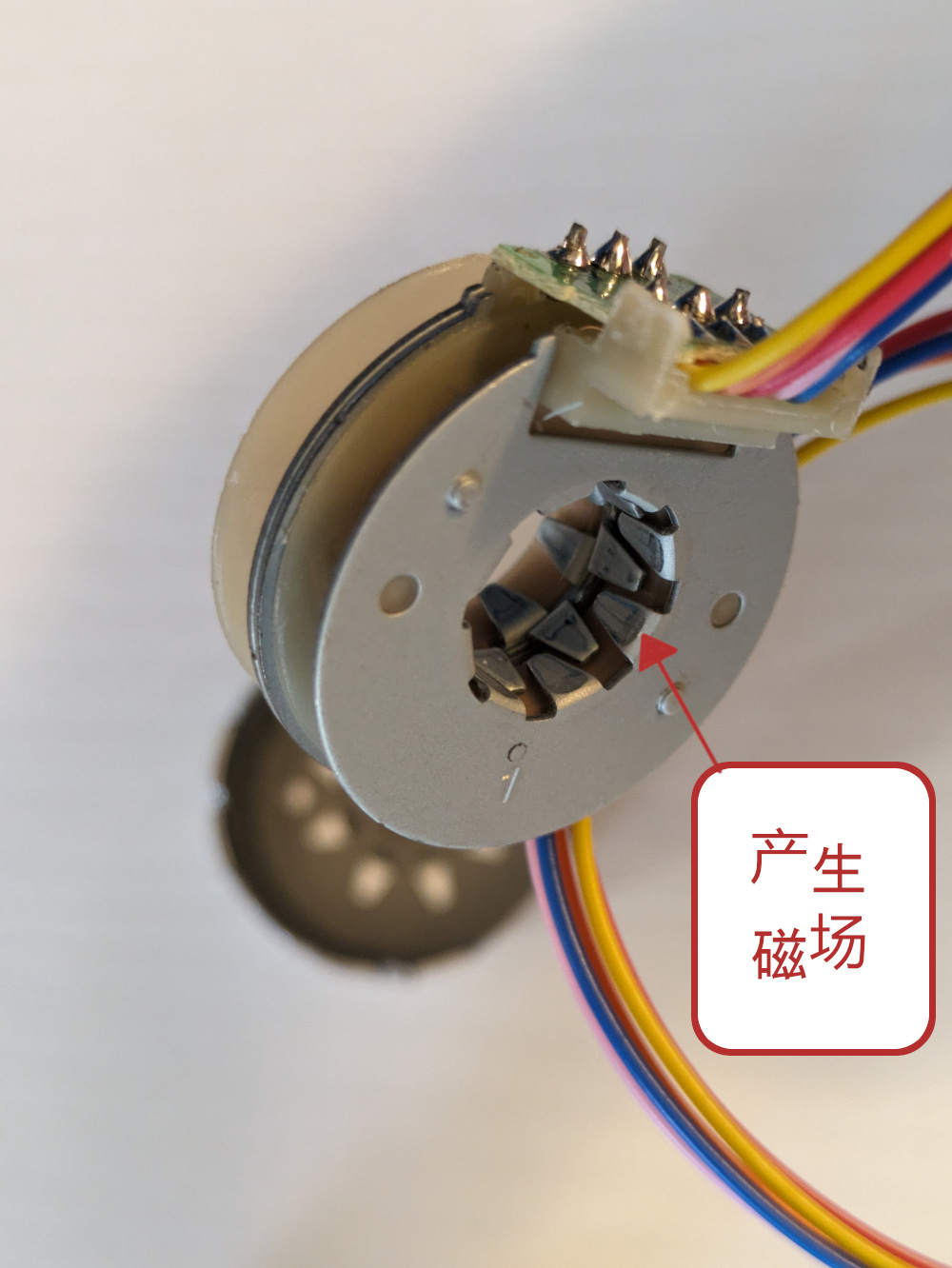 |
定子分为两层,每一层上有多个类似三角形的金属,当电流流过围绕着的线圈时,会在这些三角形金属上面产生磁场。定子产生的磁场继而驱动转子转动。
通过图片可以发现,定子分为两层,每一层又有上下两片,每片上有8个金属三角形。在上面的图片中,会发现上下两层一共只有三片,而缺少的一片在电机的外壳上,可以得到定子一共有8*4 = 32个三角形。
该电机一共有四个相位(分别通过黄色,橘色,粉色和蓝色的导线控制),每次将其中一个相位置于高电平都可以使转子转动到下一个三角形的位置,所以让转子转动一圈需要32步。
转子转动时,还需要通过电机上层的齿轮组合,我们刚才提到齿轮的比例为1:64,所以真正转动一圈360度需要32*64=2048步,对应一步的角度约为360/2048=0.17度。
下图为单极步进电机的简化图,当下一个相位产生磁场,会让转子转动到下一个三角形金属对应的位置。
| 单极步进电机的简化图 |
|---|
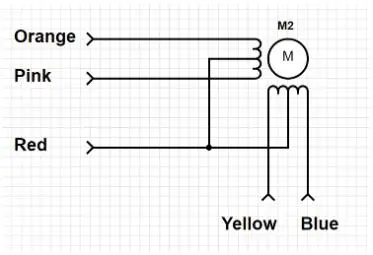 |
全步进和半步进
在控制步进电机时,我们通常会选择不同的控制方式,常用的有全步进(full stepping)和半步进(half stepping),此外还有四分步,八分步,等等。
28BYJ-48也可以实现半步进,想象一下当两个相邻的相位同时产生磁场,那么转子会转到两个三角形中间的位置,所以半步进即在两个全步进相位中间增加了这样一个中间相位。
全步进需要32步让转子转动一圈,那么对于半步进,则需要32*2=64步来让转子转动一圈。
ULN2003 单极步进电机驱动芯片
ULN2003集合了7个三极管,这些三极管可以帮助微控制器(即传感器平台)通过小电流的控制信号来驱动大电流来控制电机。
有很多生产ULN2003的厂家,它们之间非常类似,通常可以替换使用。比如江苏长晶的这款ULN2003,链接。
| 驱动芯片原理图 |
|---|
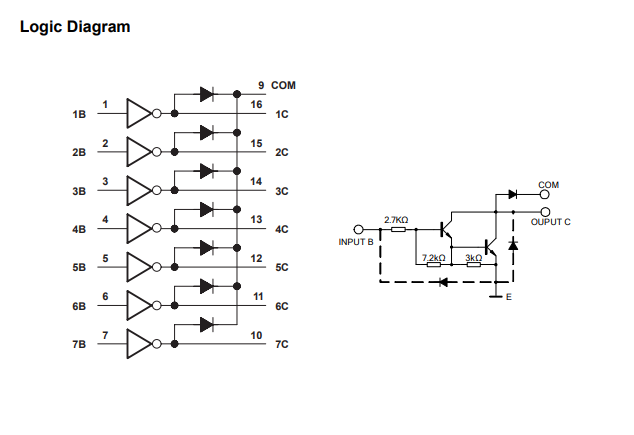 |
ULN2003的原理图并不复杂,输入端为1B-7B,输出端为1C-7C。通过输入端的控制信号,来控制输出端的电压。最高可以控制40V的电压,因为这里使用的是5V版本的28BYJ-48电机,所以COM引脚接5V电源。
步进电机有4相,将每相的导线依次连接到1B,2B,3B,4B即可。
用途
步进电机适用于以下方面:
- 定位: 由于步进电机以精确可重复的步进方式移动,因此在需要精确定位的应用中表现出色,例如3D打印机、数控机床(CNC)、摄像机平台和X、Y绘图仪。某些硬盘驱动器也使用步进电机来定位读/写头。
- 速度控制: 精确的运动增量还允许对旋转速度进行出色的控制,适用于过程自动化和机器人技术。
- 低速扭矩: 普通的直流电机在低速时扭矩不大。步进电机在低速时具有最大扭矩,因此它们是需要低速高精度的应用的良好选择。